►
From YouTube: Optimizing Data Preprocessing in Cosmo-3D: Developing Efficient Pipelines with DALI & Nsight Systems
Description
Thorsten Kurth from NVIDIA presents a talk on Optimizing Data Preprocessing in Cosmo-3D -Developing Efficient Pipelines with DALI and Nsight Systems. Recorded live via Zoom at GPUs for Science 2020. https://www.nersc.gov/users/training/gpus-for-science/gpus-for-science-2020/ Due to some data loss, this recording is missing the start of the talk. Session Chair: Michael Rowan.
A
So
this
is
a
very
generic,
a
very
generic
setup,
so
they
tweak
this
for
for
their
specific
purpose,
and
the
important
part
is
that
it's
all
3d
and
3d
usually
means
you
have
more
memory
movement,
and
that
is
what
it
challenges.
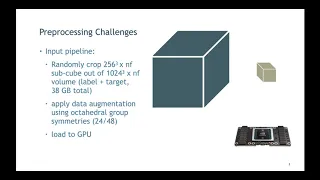
So
the
input
data
consists
of
these
simulation
outputs
and
what
they're
using
is
they
use
a
big
cube
of
data
like
a
1024
grid
sites,
cube
grid
sites,
times
number
of
features,
so
number
of
features
will
be
for
the
n-body
part,
the
density
and
the
velocity
in
3d
right
and
for
the
target.
A
It
will
be
these
these
three,
these
four
plus
the
the
temperature,
so
the
total
size
of
this
thing
is
38
gigabytes.
So
what
they
want
to
do
is
now
crop
out
sub
volumes
of
256
cube.
They
want
to
essentially
feed
to
the
neural
network,
because
this
whole
thing
doesn't
fit
and
also
they
hope
to
get
some
effect
through,
like
technically,
like
a
fruit
is
sampling
of
like
a
better
con,
better
convergence
and
better
so
that
the
network
learns
features
like
translational
invariants
and
things
like
that.
A
So
they
also
want
to
do
data
augmentation,
which
means
that
they
don't
only
want
to
crop
out
this
block.
They
also
want
to
rotate
it.
So
the
symmetry
group
they
have
is
the
octahedral
group,
so
all
sorts
of
cubic
rotations
and
essentially
also
reflections.
They
could
apply
to
that
to
increase
virtually
increase,
their
their
data
set
size
and
then
load
this
onto
the
gpu
okay.
So
that
is
that
sounds
pretty
easy
and
you
can
readily
go
and
code
this
up,
for
example,
in
numpy
and
pytorch.
A
So
pytorch
itself
has
a
has
a
nice
data,
loader
framework
and
the
rest.
You
can
do
numpy
right
so
what
they
do?
They
basically
load
all
the
data
into
the
memory,
which
is
a
full
copy
per
process.
So
it's
like
38
gigabytes
per
process
right.
So
if
you
are
in
a
box
with
like
eight
gpus,
you
have
like
eight
times
that
in
memory,
then
you
apply
a
random
crop
and
rotation
and
then
copy
the
buffer
into
a
pi
torch
tensor,
so
the
crop
buffer.
A
This
is
important
because
when
you
basically
slice
data
in
numpy,
it
will
create
a
handle
to
the
original
data
with
some
and
modifies
the
strides.
It
will
not
create
a
copy,
but
pytorch
doesn't
have
all
the
information
numpy
has
and
what
pytorch
wants
is
a
contiguous
buffer
with
basically
canonical
strides.
A
So
what
you
need
to
do
is
you
need
to
create
some
additional
data
copy
and
return
it
as
a
pytorch,
tensor,
and
then
pytorch
can
use
it
and
go
okay.
So
that
is
what
they
had
and
I
looked
at
the
I
o
performance
of
this
thing,
and
this
is
how
it
looks
like
basically
measured
in
samples
per
second,
when
you
scale
out
to
16
gpu
on
a
ddg
x2.
So
that's
important
here.
A
I
just
want
to
see
how
the
the
the
intra
node
scaling
is
right,
because
when
you
scale
out,
you
share
certain
resources.
Sources
such
as
like
the
cpu
resources
and
as
you
can
see,
it
falls
over
at
some
point
and
the
potential
reasons
for
that
could
be
is
that
you
saturate
the
memory
bandwidth
from
the
cpu
to
to
the
to
the
gpu,
and
you
have
some
cache
contention
here,
because
the
random
rotations
they
apply.
So
it's
like
basically
consists
of
like
reflections
in
memory
and
transposition,
so
it's
pretty
expensive.
A
So
I
think
what
what
you
have.
What
you
have
here
is
two
things
you
run
out
of:
maybe
a
fret
parallelism
and-
and
you
you
share
a
lot
of
memory
resources
between
these
these
guys.
So
that
is
not
not
very
good.
So
what
you
of
course
have
when
you
scale
out
in
that
way
on
the
box,
you,
you
basically
have
more
gpus.
So
why
not
put
this
stuff
on
the
gpu?
And
then
you
don't
have
these
issues
right.
A
So
how
do
you
do
that?
This
is
pretty
simple.
You
can
create
a
gpu
enabled
pipelines
with
a
software
called
dali.
It's
an
nvidia
software
which
allows
you
to
build
pre-processing
pipelines
for
any
data,
analytics
workflow,
not
only
deep
learning,
but
it's
it's
mainly
targeting
the
deep
learning
like
applications
and
what
you
can
do
is
you
can
build
the
pipeline
for
cpu
or
gpu
or
mixed,
so
you
can
run
part
of
it
on
the
cpu
part
of
it
of
the
gpu.
What
you
think
works
best.
A
It
supports
various
input
formats,
like
certain
images
for
image
formats,
videos
sound.
What
have
you
and
you
have
a
broad
framework
support.
So,
while
the
dali
pipeline
you
build
is
pretty
pretty
much
framework
agnostic,
you
can
feed
it
or
they
provide
like
wrapper
functions
to
feed
it
into
pytorch
or
tensorflow
stuff,
like
that,
and
it
comes
pre-installed
with
the
ngc
containers
you
find
on
nvidia
gpu
cloud.
A
They
also
open
source.
So
they
have
a
github
page.
If
you
have
a
feature
request
or
bug
report
or
something
you
can,
you
can
file
it
there
and
they
might
look
at
it
at
some
point
and
they
are
pretty
responsive.
So
it's
pretty
nice
okay,
so
I
did
that
so
I
just
used
it,
and
the
first
thing
you
need
to
do
is
very
boilerplate.
A
You
first
look
what
kind
of
input
readers
dali
offers-
and
you
see
that
for
this
specific
purpose
there
isn't
any
so
they
they
offer
something
which
is
called
external
source
which
allows
you
to
feed
arbitrary
data
into
your
daily
pipeline.
So
what
you
need
to
do
is
you
create
an
iterator
which
feeds
your
pipeline
and
then
the
pipeline
will
take
it
from
there
to
fit
in
your
network,
okay.
So
that
is
what
I
do.
It's
basically
just
some.
It's
basically
the
same
thing
as
before,
but
without
the
rotation
stuff.
A
In
this
case,
we
just
do
we
use
a
lot
of
rotation
operators
right,
so
we
want
to
basically
sample
the
the
the
octahedral
group-
and
we
basically
do
this
by
rotating
about
the
random
angle,
about
one
of
these
three
axes.
Okay,
so
that
is
that
and
then
you
need
to
to
tell
it
how
these
ops
are
tied
together
right.
So
you
need
to
basically
define
what
is
called
a
graph,
and
that
is
done
here.
So
we
take
this
external
source.
So
we
take
this
this
input
and
target.
A
We
upload
it
to
the
gpu,
because
we
want
to
use
it
as
a
gpu
pipeline
and
then
we've
we
pipe
it
to
all
three
rotations
like
step
by
step,
and
then
we
need
to
add
an
additional
transposition,
and
the
reason
for
this
is
here
because
dali
wants
to
have
the
feature
dimension
to
be
last
for
the
rotations,
whereas
pie
torch
wants
it
to
be
first
okay.
So
this
is
the
limitation
of
both
frameworks
in
that
sense,
and
they
don't
match.
A
So
you
need
to
add
this
additional
transposition,
but
you
can
hope
that
this
is
just
a
memory
movement
of
a
100
max
or
something
so
it
should
be
fine,
and
then
you
return
it.
So
that's
it
so
it
looks
pretty
much
like
an
iterator.
You
define
this
graph
daily
will
take
it,
it
will
compile
it
and
from
there
it
will
basically
create
an
efficient
pipeline.
A
A
You
import
the
generic
iterator
from
the
python
plugin
from
dali,
so
this
is
shown
here
and
what
I
did
in.
On
top
of
that
you
don't
need
to
do
this,
but
you
can.
I
wrote
the
wrapper
around
that
okay,
so
basically,
I
wrote
a
wrapper
around
the
this
iterator
to
make
it
a
drop-in
replacement
for
the
pie,
torch
iterator.
I
had
because
this
daily
generic
iterator
is
accessed
a
bit
differently
than
this.
A
So
that
being
said,
this
basically
is
now
drop
and
replacement
for
what
I
have,
but
it
does
a
lot
of
stuff
on
the
gpu,
and
this
was
the
original
performance
of
the
pipeline
and
with
the
new
one.
It
looked
like
that.
So
there's
still
some
scaling
issues
potentially
by
like
when
you,
when
you
read
from
from
memory
the
data
from
memory,
but
the
overall
performance
is
much
faster
because
most
of
this
expensive
stuff
is
now
on
the
gpu.
So
I
was
thinking
okay
great,
so
I'm
done
here
right.
A
So,
let's
just
connect
the
whole
the
whole
a
problem
to
it
basically
hook
the
framework
hook
it
into
the
framework
and
see
what
happens
right.
So
I
did
this.
This
is
the
original
original
workflow
scaling,
so
samples
by
seconds
drops
by
a
lot.
But
of
course
you
have
this
expensive
training
set
training
step
now
and
with
the
daily
pipeline
looks
the
same.
So
I
was
a
bit
frustrated
here.
I
was
like
gosh,
we
did
all
this
all
this
work
to
optimize
this
pipeline,
look
much
better.
So
why
is
that?
A
So?
The
first
reason
could
just
be
that
io
was
not
the
issue
here.
So
I
was
like
okay,
let's,
let's
optimize
the
whole
thing
now
and
the
easy
thing
you
can
do
is
use
a
mix
precision,
so
the
original
network
was
run
in
in
fp32,
so
basically
float
or
single
precision
and
pytorch
supports
something
which
is
called
automatic,
mixed
position
or
amp
even
natively
when
you
go
to
version
1.6
and
higher.
A
So
when
you
check
out
the
recent
master
branch,
you
will
get
it
and
this
allows
you
to
offload
certain
operations
to
the
tensor
cores,
so
I'm
on
the
volta
system
here.
So
if
you
use
ampere
it's
the
same
thing,
it
basically
enables
support
for
tensor
cores
for
convolutions
and
dense
operations,
and
since
this
network
is
like
convolutional
mostly
this
will
help
a
lot.
A
A
It
will
keep
copies
of
the
master
weights
in
fp32
and
usually,
if
you
apply
this
kind
of
things,
you
will
for
deep
learning
problems,
you
will
see
a
speed
up
at
no
performance
degradation,
so
that
is
kind
of
good
and
the
right
hand
side.
Sorry,
on
the
right
hand,
side
you
see
how
this
is
done.
It's
basically
by
adding
a
few
lines
of
python
code
and
the
most
important
parts
are
these.
A
A
A
Let's,
let's
profile
it,
and
for
that
you
can
use
ensys
or
inside
systems,
and
it
has
this
nice
tracing
functionality
where
you
can
trace
qr
codes,
which
is
standard
or
cubeless,
but
also
nvtx
and
nvtx,
is
a
library
which
allows
you
to
to
annotate
code
with
your
own.
Like
ranges
on
the
right
hand,
side.
A
A
You
can
put
put
these
ranges
and
and
tell
it
to
annotate
them
so
that
you
would
see
them
on
the
timeline,
and
this
is
how
it
looks
like
when
you
profile
it
and,
as
you
can
see
on
the
on
the
in
the
middle
of
the
screen,
this
gray
stuff,
you
see
like
the
forward,
pass
the
backward
pass
and
you
see
all
the
convolution
calls
made
by
pytorch,
and
what
you
also
can
see
is
this
stuff.
This
is
bad.
This
is
dali
and
it's
actually
not
overlapping
with
the
forward
backward
pass.
Okay.
A
So
this
was
like
what
is
going
on
here
and
you
see
this
big
gap
between
the
forward
and
back
between
the
iteration
steps,
so
that
is
also
bad,
and
what
you
also
can
see
is
another
thing:
is
that
there's
this
mem
copy
essence
in
the
way,
spanning
the
whole
block,
and
that
should
trigger
your
alarm?
It's
nicely
colored
and
red,
because
this
is
not
great
right
when
you
look
into
this.
A
What
happens
here
is
that
at
the
end
of
this
long,
cuda
copy
essence
region,
you
see
that
there
is
a
mem
copy
from
device
to
host
into
pageable
memory,
and
that
is
blocking
so
there's,
basically
an
asset
member
copy
into
pageable
memory.
Don't
do
that
so
now.
The
question
is
what
is
happening
here
and
since
this
only
happens
when
you
enable
amp,
I
was
talking
to
to
the
guy
who
implemented
this
amp
part,
and
it
turns
out
that
actually
this
is
this
line
is
responsible
for
it.
This
is
kind
of
funny.
A
A
We
basically
use
pin
memory,
download
it
into
pin
memory,
and
this
turns
out
to
be
a
more
brutal
python,
a
pie
torch
back
so
that,
basically,
if
you
ask
for
a
non-blocking
copy,
it
will
not
create
a
cpu,
a
pin,
cpu
buffer
to
copy
non-blocking
into
so
basically
unknown.
Blocking
copies
in
pi
torch
can
turn
out
to
be,
can
turn
out
to
be
blocking
if
you
do
not
pin
the
buffer
manually.
So
there
is
a
big
bug.
A
We
fixed
this
in
this
case
manually,
and
I
think
there
is
a
couple
of
like
a
discussion
around
it
how
to
fix
this
in
general.
Okay,
so,
with
these
fixed
results,
we
can
profile
again
and,
as
you
see
now,
great
dali
is
overlapping.
You
see
this.
This
red
cuda
copy
essence
is
just
gone
right
and
there's
this
cute
event
synchronized,
but
that
is
fine.
A
That
is
what
is
supposed
to
be
there,
okay,
but
you
still
see
there's
this
gap
and
it
turns
out
that
most
of
the
ios
synchronous-
and
this
is
because
dali
is
careful-
because
I
feed
external
input-
dali
makes
no
assumptions
about
threat,
safety
and
memory,
coherence
and
stuff.
It
will
assume
that
it
has
to
take
the
data
copy
it
in
the
main
thread
before
it
can
do
anything
with
it.
So
I
was
like
okay,
that
is
stupid
right
I
mean
dali
is
very
careful
here
and
it's
the
right
thing
to
do.
A
Maybe
but
it
doesn't
help
a
lot
with
performance,
so
what
you
need
to
do
is
hide
part
of
that
overhead,
so
what
I
added
stubble
buffering.
So
basically
I
have
two
buffers.
I
can
copy
the
data
into
from
the
memory
and
I
do
it
using
concurrent
futures
in
python
right.
So
there's
a
python
function,
calling
a
concurrent
features
which
you
can
say
copy
the
data
now
so
before
you
process
the
actual
badge
you
prefetch,
the
next
one
and
then
and
the
next
time
before
you
process
the
extra
batch.
A
You
wait
for
the
badge
to
arrive,
and
that
is
very
easily
done
with
a
few
lines
of
code.
I
don't
want
to
go
into
detail
here,
it's
technically
a
slight
modification
to
what
I
had
before,
and
you
need,
of
course,
to
have
a
second
buffer
around,
because
you
need
to
need
to
have
the
actual
and
the
next
batch
in
separate
buffers.
A
Okay,
so
that's
what's
the
original
scaling
and
with
these
fixes
actually
you'll
get
a
little
bit
better
performance.
So
this
is
the
the
orange
line
right
as
you
can
also
see
the
the
yellow
scaling
here.
This
is
just
with
the
amp
fix,
without
overlapping
the
the
I
o
a
bit,
and
this
is
because,
even
if
we
fix,
if
he
fixes
mp
issue
and
dali,
starts
overlapping
with
the
block,
it
previously
overlapped
with
this
still
synchronous
part
of
the
io.
A
So
it
overlapped
with
something
not
the
stuff
we
wanted
to
overlap
with,
but
it
overlapped
with
the
oh.
So
we
couldn't
see
a
benefit
here,
but
once
you
overlap
part
of
the
ao2,
you
see
a
benefit,
but
when
you
profile
it,
it's
still
not
great.
There's
still
this
gap,
and
it
turns
out,
as
I
said,
that
dali
copy
still
doesn't
a
buffer
copy
of
the
of
the
buffer.
I
provide
into
internal
storage
and
that
actually,
you
cannot
get
get
around
with
without
modifying
dahlia
accordingly.
A
We
have
those
some
of
those
are
going
to
be
fixed
soon,
so
they
will
add
a
zero
copy
option,
for
example,
to
this
external
source,
where
you,
as
a
user,
have
to
make
sure
have
to
make
the
guarantee
that
this
buffer
won't
go
away
for
the
next
couple
of
steps.
So,
in
my
case,
in
my
setup
this
is
the
case,
but
you
have
to
be
careful
when
you
do
this,
and
also
what
I
demonstrate
is
that,
with
just
a
few
line
of
python
code,
you
can
actually
get
a
lot
of
speed.
A
B
B
A
No,
I
first
looked
at
the
at
the
I
o
part
right,
so
the
python
part
looks
pretty
much
optimized
to
me.
So,
like
there's
everything
I
mean,
I
think
that
everything
overlaps,
what
what
you
can
overlap.
I
mean
we
found
this
issue
in
the
in
the
pytorch
in
the
in
the
amp
right,
so
that
that
is
one
thing
you
can
see
here.