►
From YouTube: 8. Introduction to OpenACC -- Brent Leback
Description
Part of the Nvidia HPC SDK Training, Jan 12-13, 2022. Slides and more details are available at https://www.nersc.gov/users/training/events/nvidia-hpcsdk-training-jan2022/
A
Again,
my
name
is
brent
levac.
If
you
were
here
yesterday,
you
had
my
introduction,
so
I'm
just
a
member
of
the
nvidia
hpc
sdk
team.
I
do
a
lot
of
customer
support,
10
hackathons
and
help
out
wherever
I
can
so
today
we're
going
to
talk
about
open,
acc
first
and
then
I'm
going
to
also
talk
about
openmp.
These
are
two
directive
based
models
and
we'll
talk
about
the
similarities
and
the
differences
between
the
two
models.
A
Open
acc
resources
so
there's
a
website.
Openacc.Org
has
a
lot
of
the
resources
like
the
specification
where
to
find
literature
on
it
where
to
find
maybe
some
blogs
or
success
stories,
upcoming
events.
So
through
nvidia
we
have
a
lot
of
hackathons
over
the
course
of
the
year.
I'm
currently
involved
with
one
at
georgia,
tech
I've
been
involved
with
a
lot
of
the
hackathons
over
the
years
and
the
hackathons
are
open
to
people
using,
of
course,
open
acc
also
openmp
just
cuda.
A
A
Let's
continue
on
here
basic
syntactic
concepts,
so
both
openmp
and
openacc
use
directives.
We,
I
guess
in
fortran
the
the
correct
name,
is
directive
in
c.
Maybe
the
it's
also
called
a
directive,
but
it's
found
pragma.
So
you
say:
pound
pregnant
acc
directive
name
or
in
in
fortran.
Most
fortran
that
I've
come
across
now
is
is
free
form.
A
Now,
if
you
use
a
compiler
that
doesn't
recognize
those
directives
either
it
doesn't
have
that
capability
or
you
don't
turn
the
the
compiler
options
on
to
recognize
those
directives.
You
should
still
have
your
original
sequential
code,
which
will
work
the
way
it
always
so
that's
both
powerful
and
has
a
few
drawbacks.
I
have
to
warn
people.
I
have
been
involved
many
times
at
hackathons
in
in
my
own
work,
where
I
have
misspelled
the
directive.
A
I've
said
bang
acc
or
bang
bang
acc
that
we've
just
you
know,
created
a
typo
when
we
type
things
in,
and
you
will
probably
do
that
yourself.
If
you
use
directives
a
lot
and
then
it
just
becomes
a
comment
and
I've
been
at
a
hackathon
where
we've
wasted
like
half
a
day,
because
we
had
a
typo
in
the
comment,
and
so
the
directive
wasn't
doing
what
we
thought
it
should
be
doing.
It
was
just
a
comment,
so
so
you
got
to
take
the
good
with
the
bad
a
little
bit.
A
A
A
So
I'm
going
to
kind
of
keep
with
the
the
design
of
the
two-day
talks,
we'll
start
with
the
highest
level.
First,
so
the
highest
level
compute
construct
in
open
acc
is
the
kernels
construct
and
there
have
been
many
successful
ports
of
applications
that
only
use
acc
kernels
and
what
they
do.
Is
they
just
kind
of
find
the
the
section
of
code
and
they
put
acc
kernels
at
the
beginning
and
the
kernels
at
the
end.
A
So
what
this
does
is
expresses
that
this
region
of
code
may
contain
parallelism
and
it's
up
to
the
compiler
to
determine
what
can
safely
be
parallelized
and
offloaded
to
the
gpu.
So,
depending
on
the
compiler,
you
may
have,
you
know,
begin
kernels
and
kernels
and
you
can
have
multiple
sections
or
multiple
loops
inside
of
there
and
the
compiler
is
free
to
identify
the
number
of
parallel
loops
in
there
and
and
generate
multiple
kernels
for
offload.
In
this
case
it
could
generate
two
kernels
or
it
could.
A
You
know,
fuse
the
two
loops
and
generate
one
kernel:
it's
not
specified
by
the
the
open,
acc
spec,
how
many
kernels
to
generate
here.
It's
up
to
the
compiler's
capabilities
and
the
compiler
analysis
to
make
that
decision.
For
you
and,
like
I
said
many
people
are
comfortable
with
this,
and
it's
worked
in
a
lot
of
major
applications.
A
A
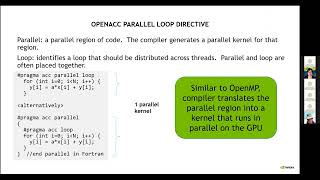
So
you
basically
say
pragma
acc,
parallel
or
pragma,
acc
parallel
or
fragment,
acc
loop,
and
so
just
like
in
openmp.
Acc
parallel
just
starts
a
kernel
region,
and
then
you
put
the
work
sharing
loops
inside
or
the
upper
example.
Acc
parallel
loop
is
a
combined
directive,
both
parallel
and
loop
inside
the
same
directive,
and
you
can
do
it
either
way
they
are
equivalent,
if
you
say,
acc,
parallel
and
you're
in
fortran,
you
need
to
have
an
end
parallel
and
the
same
in
c.
A
A
A
A
A
A
I
could
have
the
middle
loop
loop
worker,
I
could
have
the
innermost
loop
loop
vector
and
that's
a
common
way
to
do
it
another
way
that
I've
ended
up
using
more
and
more.
The
more
experience
I
get
is
just
the
bottom
block.
There,
acc
parallel
loop
collapse,
three
and
I
let
the
compiler
compute
the
the.
A
What
am
I
trying
to
say,
the
decomposition
of
the
three
loops
inside
the
kernel
and
I'll
show
a
little
bit
more
example
of
that
later.
So
you
can
put
gang
and
vector
on
that
and
it
will
use
both
the
blocks
in
a
grid
and
the
threads
in
a
block
or
running
that,
and
you
just
kind
of
end
up
with
the
default
configuration
that
the
compiler
chooses.
A
So,
but
if
you,
if
you
know
something
like
you
know,
my
vector
dimension
of
my
arrays
is
not
128.
It's
only
30
or
32,
or
you
know
a
short
number.
You
can
force
the
vector
length
to
be
smaller,
so
vector
length.
Q
use
a
vector
length
of
q
for
this
parallel
region.
Of
course
you
can
change
this
for
every
different
kernel,
which
is
nice.
A
You
don't
have
to
have
one
setting
over
the
whole
program,
so
this
gives
you
some
flexibility
and
it's
a
little
more
like
cuda,
in
that
you
can
have
different
launch
bounds
for
every
different
kernel.
So
we
talked
about
yesterday
a
little
bit
about
do
concurrent
and
some
of
the
limitations
of
do
concurrent
and
one
of
the
ones
that
I
pointed
out
was
you
don't
have
any
control
over
the
launch
configuration
in
do
concurrent
currently
and
so
open,
acc
and
openmp
is,
will
show,
give
you
some
flexibility
and
control
over
the
launch.
A
You
do
not
always
want
to
work
share
a
loop
in
your
kernels,
so
sometimes
you
want
every
thread
to
run
the
entire
loop
you
want
well.
This
is
often
the
case
in
you
know
multi-dimensional
loop
constructs.
So
if
you
have
a
four
or
five
I've,
even
seen,
seven
deep
nested
do
loops
and
fortran
some
of
the
loops.
A
You
just
want
every
thread
to
run
sequential,
so
you
can
force
that
using
acc
parallel
by
saying
acc
loop
seq
for
sequential,
so
you
can
still
you
know,
work
share
outermost
loops
and
then
run
sequentially
an
innermost
loop
or
you
can.
You
can
actually
run
sequentially,
not
the
innermost
loop.
You
can.
The
acc
loop
sequential
can
occur
anywhere
in
the
loop
structure
or
above
any
for
loop.
A
One
recommendation
for
you
is
that
don't
put
acc
loop
sequential
on
the
loops
that
have
arrays
with
the
index
being
the
leading
dimension
of
your
array.
So
yesterday
I
talked
about
the
most
important
thing
for
performance
on
a
gpu
was
at
the
vector
dimension,
use
the
vector
index
as
the
leading
dimension
of
most
of
your
array
accesses.
So
in
this
example,
maybe
it's
not
great,
because
the
array
accesses
are
pretty
mixed
up.
There's
I
j
I
k
and
k
j.
A
This
last
note,
sometimes
the
m
info
messages
will
tell
you
that
the
compiler
found
a
dependency
in
one
of
the
loops
and
forced
it
to
be
sequ,
and
sometimes
even
if
you
mark
the
loop
as
seq,
the
compiler
m
info
will
still
tell
you
that,
which
is
kind
of
an
annoyance
to
me.
But
again,
we've
stressed
this
many
times.
Look
at
the
m
info
output
and
verify
that
what
the
compiler
is
doing,
syncs
with
what
you
think
should
be
happening.
A
So
it's
useful
when
the
loop
extents
are
short
or
there
are
more
loops
than
levels.
So
you
know
I
mentioned
you
could
have
a
four
or
five
six
dimensional,
you
know
do
loops
or
four
loops.
You
only
have
three
levels
of
parallelism,
but
maybe
some
of
the
loops
are
short
like
you
know,
only
one
to
four
or
zero
to
seven
or
something
like
that.
So
you
know
you
don't
want
to
dedicate
a
whole.
A
You
know
loop
to
one
of
your
units
of
parallel
is
so
you
want
to
collapse
a
couple
of
those
together.
So
if
you
have
the
code
on
the
left,
basically
what
the
compiler
does
is
takes
the
two
loop
bounds,
both
in
in
this
case
and
creates
a
single
loop
from
zero
to
n
times
n.
And
then,
if
you
use
I
and
j
as
indices
into
arrays,
it
does
you
know
the
correct
arithmetic,
either
divide
or
mod
or
or
both.
I
don't
know.
If
I
did
that
exactly
right,
but
it's
something
like
that.
A
To
get
the
I
and
j
values,
and
so
you
might
think
well,
that's
just
a
lot
of
overhead,
but
remember
that
these
loops
are
loop
shared.
So
every
thread
has
to
do
this
anyway
right,
so
it
doesn't
create
any
more
work
than
you
would
have
to
do
anyway
by
the
time
that
the
the
loops
from
zero
to
n
minus
one
are
mapped
onto
some
number
of
threads
or
some
number
of
blocks,
so
the
work
is
done
anyway.
You
shouldn't
see
a
performance
degradation
for
this
little
bit
of
extra
arithmetic.
A
A
A
So
fv
is
a
function,
that's
our
routine,
vector
and
so
vector
routines
can
have
vector
loops
inside
of
them
and
then
inside
the
vector
loop.
I
call
fs,
which
is
another
function,
but
it's
a
sequential
function
and
it
just
returns
some
function
of
a
so
you
can
have
pretty
deeply
nested
call
chains
in
open
acc
and
the
each
call
in
the
this
is
a
fortran
example.
In
the
fortran
sense,
the
call
has
to
be
explicit
and
you
need
to
know
the
interface
of
the
routine
you're
calling.
A
So
maybe
this
example
isn't
quite
right
that
f,
g,
f,
fv
and
fs
need
to
be
either
in
an
interface
block
or
in
a
module.
That
program
main
can
see
so
open
acc
makes
it
a
little
easier
on
the
compiler
vendor
in
that,
when
you
compile
and
call
routine
fg,
you
know
what
level
in
the
parallelism
tree
or
hierarchy
that
each
routine
is
in.
Is
it
a
gang
level
routine?
Is
it
a
vector
level
routine,
or
is
it
a
sequential
level
there's
also
worker
again
we
don't
use
worker
very
often.
A
The
way
that
the
compiler
and
runtime
do
this
under
the
hood
is
the
subject
of
a
lot
of
experimentation,
research
churn
and
we're
fixing
it
all
the
time
we
almost
have
like
a
full-time
compiler
person
that
just
works
on
reductions.
We'll
talk
a
little
bit
more
about
that
later.
But
it's
it's
a
very
important
part
of
the
gpu
code
generator.
A
So
each
thread
calculates
its
parts.
The
reduction
doesn't
have
to
just
be
a
high
level
reduction
over
the
whole
kernel.
You
can
have
reductions
within
a
gang
over
a
vector
or
over
a
worker,
or
you
know.
If
it's,
if
it's
a
sequential
loop,
then
it's
not
really
a
reduction,
because
every
thread
is
computing,
its
sum,
but
the
compiler
will
insert
code
to
produce
the
single
result
at
whatever
level
you
need
and
if
you've
ever
written
a
reduction
in
cuda.
You
know
just
how
nice
of
a
feature
this
is.
A
A
A
The
data
construct
defines
a
region
of
code
in
which
gpu
arrays
remain
on
the
gpu
and
are
shared
so
you
can
have.
This
is
an
example
of
a
structured
data
region.
So
a
structured
data
region
exists
all
within
the
same
function
or
subroutine
in
fortran,
there's
a
definite
beginning
and
end
in
the
same
program
unit
and
within
that
the
data
within
the
data
directives
will
remain
on
the
gpu
the
entire
time
it.
A
A
A
At
every
kernel
we
copied
the
data
over,
ran
the
kernel
and
copied
the
data
back.
Then
later
we
decided
well
the
same
style
of
directives
that
we
use
to
generate
kernels.
We
can
use
to
generate
data
motion
or
data
movement,
so
we
created
things
called.
You
know
copy
in
copy
out
all
these
and
then
about
a
year
later
we
decided
well
when
we
port
code
a
lot
of
times.
A
We
put
the
data
directives
just
around
the
kernels
and
then
we
move
one
subroutine
higher,
and
then
we
put
data
directives
there
and
then
we
move
another
subroutine
higher
and
put
data
directives
there
and
that's
kind
of
the
the
method
of
tuning
for
performance
is
to
move
the
data
movement
higher
and
higher
in
your
program.
So
it's
you
know
resident
over
all
the
time
steps.
A
For
instance,
we
talked
about
yesterday,
so
it
occurred
to
us
that
really
we
don't
want
to
have
to
remove
the
data
directives,
but
we've
always
had
this
notion
that
the
data
directives
are
present
or
copy
present
or
copy
in
present
or
copy
out.
So
what
that
means
is
the
open,
acc,
runtime
and
openmp.
A
So
you
don't
suffer
the
performance
penalty
of
copying
in
at
every
level
of
your
call
tree.
You
only
do
it
at
the
highest
level
and
then
you
just
have
a
tiny
little
performance
hit
just
to
check
the
present
table,
which
is
just
a
you
know,
reading
a
little
bit
of
from
the
cpu
memory.
So
it's
not
a
very
expensive
operation
at
all.
A
So
just
a
little
history
there
and
something
to
watch
out
for
that.
These
data
clauses
are
present
for
variants.
In
fact,
our
compiler
probably
still
accepts
the
syntax
present
or
copy,
which
was
shortened
to
p
copy,
and
then
it
just
became
copy
is
the
same
as
so,
and
I
digress
there
a
little
bit
but
copy
of
list
copies
both
in
and
out
copy
in,
of
course,
only
copies
in
copy
out
only
copies
out.
A
Sometimes
you
don't
even
need
a
copy
of
the
gpu.
It's
just
kind
of
a
scratch
space,
while
you're
in
the
kernel,
so
that's
create
and
open.
Htc
has
something
called
present
where
it
just
checks,
and
so
it's
assumed
that
there's
a
data
directive
outside
of
of
this
data
directive.
So
I'm
just
checking
that
the
data
is
already
present.
A
Unstructured
data
regions,
so,
as
I
mentioned
before,
structured
data
regions,
the
beginning
end,
has
to
be
in
the
same
program.
Unit
worked
great
for
a
while,
but
then
you
know
there's
complicated
codes
where
all
the
data
is
created
in
the
emit
function
and
all
the
data
is
torn
down
in
the
file
function
and
stuff
like
that.
So
you
wanted
the
data
directives
where
the
data
was
initialized,
so
these
are
unstructured.
A
A
The
one
thing
I
wanted
to
point
out
here
is
that
there
is
another
form
of
data
directives
that
I
didn't
touch
on
anywhere
else
and
that's
the
acc
declare
create
data
directive
and
what
this
is
useful
for
is
two
cases.
One
is
for
global
data,
so
in
fortran,
if
you
have
data
in
a
module,
that's
global
data
see
it's
like
data
at
the
global
level
and
also
it
can
be
used
for,
like
local
arrays,
within
a
function.
A
A
A
So
this
is
actually
a
always
a
actionable
directive,
so
it
always
updates
it's
not
a
present
for
operation.
So
a
lot
of
times
you
have
a
you
know.
Your
data
is
really
high
out,
but
you
need
to
get
that
data
onto
the
cpu
or
update
the
values
on
the
gpu
and
typically
or
one
common
example.
Of
this
is
say
you
need
to
do
mpi
communication,
so
you
know
I
need
to
update
the
host
version
of
x
in
the
code
down
below
right
before
I
do.
An
mpi
send.
A
So,
that's
why
you
would
use
the
update
clause
so
the
the
spec
itself
they
changed,
host
to
be
update
self.
I
find
that
kind
of
annoying,
so
I
still
use
update
device
and
update
host,
but
host
and
self
are,
for
the
most
part,
the
same
thing
there's
a
notion
in
the
spec
that
you
could
do
an
update
on
the
gpu,
so
self
would
be
device,
but
I
don't
think
in
practice.
I've
ever
seen
that.
A
A
A
A
Array
shaping
so
sometimes
the
compiler
knows
the
shape
of
your
arrays.
Sometimes
it
doesn't.
You
know
in
c
c,
plus
plus.
Sometimes
you
just
pass
a
pointer
and
the
shape
is
sort
of
just
up
to
the
programmer
to
take
care
of
in
fortran.
You
always
just
pass
a
reference,
but
the
dimensions
sometimes
can
be
different
in
for
transparent
than
they
are
at
the
high
level
right
they're
still,
you
can
just
say
star
as
the
shape
of
the
array.
A
So
if
you
suspect
something
is
wrong
here,
examine
the
m
info
output
and
the
m
info
tells
you
what
it
assumes
the
sizes
of
the
arrays
are.
If
you
want
to
be
explicit,
you
can
put
the
shape
on
your
copy
in
and
copy
out
directives,
but
note
there
is
a
little
difference
between
c
and
c,
plus,
plus
and
fortran.
A
A
So
about
two
releases
ago
we
made
a
change
to
require.
You
know
the
colon
notation.
Otherwise
we
will
just
copy
in
one
element
and
we
have
a
way
to
with
a
flag.
I
have
to
look
and
see
what
it
is,
but
it's
like
implicit
sections
or
something
like
that
to
go
back
to
the
old
behavior,
but
that
is
really
non-standard
behavior.
A
So
I
think
I'll
have
this
slide
in
both
my
opening
htc
and
openmp
box.
It's
a
useful
slide.
I
refer
to
it
a
lot,
so
I'm
glad
that
I
wrote
it.
It's
the
open,
acc
data
directives
on
the
left,
openmp
data
directives
on
the
right.
They
are
almost
identical
other
than
you
know,
slight
syntax
changes.
In
fact
our
compiler
uses
the
same
exact
runtime.
A
A
A
A
So
again
I
have
a
fortran
on
the
left
c
on
the
right
and
it's
done
pretty
much
the
same
way.
This
is
probably
almost
the
entire
talk
in
itself.
In
my
introduction,
I
just
want
to
mention
that
open
acc
uses
cues
and
the
queues
are
numbered.
So
you
just
kind
of
pick
an
arbitrary
number.
You
know
on
the
left.
I
picked
10
and
that's
my
hue
number
that
I'm
using
in
open
acc.
So
I
can
do
update
device
async
10,
I
can
do
kernels
async
10.
A
So
the
call
you
want
to
really
focus
on
here
is
when
we
set
the
qft
set
stream.
There's
a
api
function
called
acc
get
cuda
stream,
which
you
give
it
the
cuda.
I
mean
the
open,
acc
async
number
and
it
returns
the
cuda
stream,
and
this
cuda
stream
is
a
64-bit
handle.
Basically,
we
treat
it
in
fortran
as
a
64-bit.
A
Openacc
does
allow
you
to
tune
your
code
a
little
bit
like
cuda,
and
it
has
something
called
the
cache
directive
which
I'm
showing
on
the
right
here.
I
haven't
really
talked
about
private,
but
it's
kind
of
a
common
notion
among
openmp
and
openacc
that
you
can
have
private
data
at
the
gang
level
or
at
the
vector
level.
A
At
the
gang
level,
there
will
be
one
copy
of
that
for
block
thread
block
in
cuda
and
that's
very
convenient,
because
cuda
has
shared
memory
that
can
be
used
across.
You
know
all
the
threads
in
a
thread
block.
So
in
this
case
on
the
right,
the
tile
array
is
actually
put
into
cuda's
shared
memory
and
it
is
accessible
very
quickly
and
with
high
performance.
A
A
Lots
of
people
find
this
pretty
useful,
but
there
are
some.
You
know,
drawbacks
of
it,
and
sometimes
it's
performance
issues
max
reg
count
is,
is
kind
of
a
code
generator
flag.
You
know
there
are
limited
number
of
registers.
You
can
kind
of
force
the
compiler
to
use
less
registers
and
spill.
Those
more
gpu
equals
line
info
is
is
useful
if
you're
needing
to
use
some
debugging
or
diagnostics.
A
I
think
max
yesterday
talked
about
compute
sanitizer,
so
you
get
a
little
bit
more
information
out
of
the
compute
sanitizer.
If
you
have
some,
you
know
it's
called
dwarf
information
or
line
information
in
your
executable
gpu
equals
compute
capability.
Xy
only
generate
code
for
a
particular
compute
capability.
If
you're
just
running
on
perlmutter,
you
really
only
need
to
generate.
You
know,
code
for
ampere,
which
is
tc80.
A
And
finally,
we
added
a
feature:
maybe
a
year
or
two
ago
called
auto,
compare
well.
Actually
it's
called
pcast
and
pcast
stands
for
parallel.
Compiler
assisted
software
testing,
so
you
can
compile
with
gpu
equals
auto
compare
and
it
will
automatically
run
your
kernels
both
on
the
cpu
and
the
gpu,
and
then
compare
the
results
at
the
end,
and
you
can
have
some
control
over
the
comparison,
whether
it's
exact,
compare
or
provided
tolerance,
and
you
can
find
bugs
that
way.